钢丝绳电动葫芦机构的触发原理
浏览:7575 时间:2021-06-02
钢丝绳电动葫芦通常采用带制动装置的锥形转子电动机,其制动原理是:电机不工作时,弹簧产生轴向推力,使制动环紧压在制动器端盖上,整机处于制动状态。电机通电工作时,锥形转子产生的轴向磁拉力克服弹簧的轴向推力,使转子轴向移动,制动轮上的制动环脱离制动器端盖,电机旋转带动卷筒旋转钢丝绳实现升降功能。对钢丝绳电动葫芦,只有一个工作制动器存在潜在风险:起升机构在提升负载过程中如出现制动力矩不足或传动环节失效,将发生失速溜钩现象,引发安全事故。为满足更高的安全需求,钢丝绳电动葫芦制造商在传动环节末端即卷筒上设置了棘轮棘爪机构作安全制动器,当电动葫芦超速下降时触发棘爪与棘轮啮合,实现卷筒的减速制停。
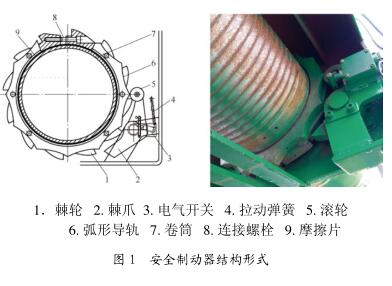
1)正常作业工况 当电动葫芦以额定起升速度进行上升或下降作业时,弧形导轨与卷筒一起转动,带动滚轮,使滚轮棘爪组合饶固定销轴摆动,摆动到一定倾角后受弹簧拉力与自身重力的作用向反方向摆动。因棘轮机构具有单向逆止属性,上升方向不会啮合;下降方向因铰臂的摆动倾角较小,棘轮与棘爪也不会啮合。
2)超速下降工况 当电动葫芦锥形制动器失灵或传动环节出现断轴情况下,卷筒超速下降,卷筒带动弧形导轨一直加速旋转,滚轮棘爪组合随之加速摆动,摆动倾角加大,棘爪与棘齿之间的间隙减小;当倾角增大到一定角度后,滚轮偏离导轨外形轨迹,安全制动器的棘爪与棘轮啮合。此时机构的自由度为0,棘轮压紧摩擦片并对卷筒产生摩擦阻力消耗能量,直至卷筒完全制停。当棘轮棘爪啮合时,滚轮按顺时针方向向外旋转,带动其下方的小销轴触发电气开关,断开电动葫芦下降方向的控制回路。
下一条: 现代起重机械的管理及发展未来